|
Songhao Huang I am a first-year PhD student in the Romi Lab at the Department of Mechanical Engineering, The Hong Kong Polytechnic University, advised by Prof. David Navarro-Alarcon. I previously earned my Master's degree in Mechanical Engineering and Applied Mechanics from the University of Pennsylvania, where I worked with Yuwei Wu and Prof. Vijay Kumar. I received my B.Eng. in Robotics from the The Southern University of Science and Technology in 2023, advised by Prof. Hongqiang Wang. |

|
ResearchI am interested in (Multi-)Robot Planning and Learning. |
|
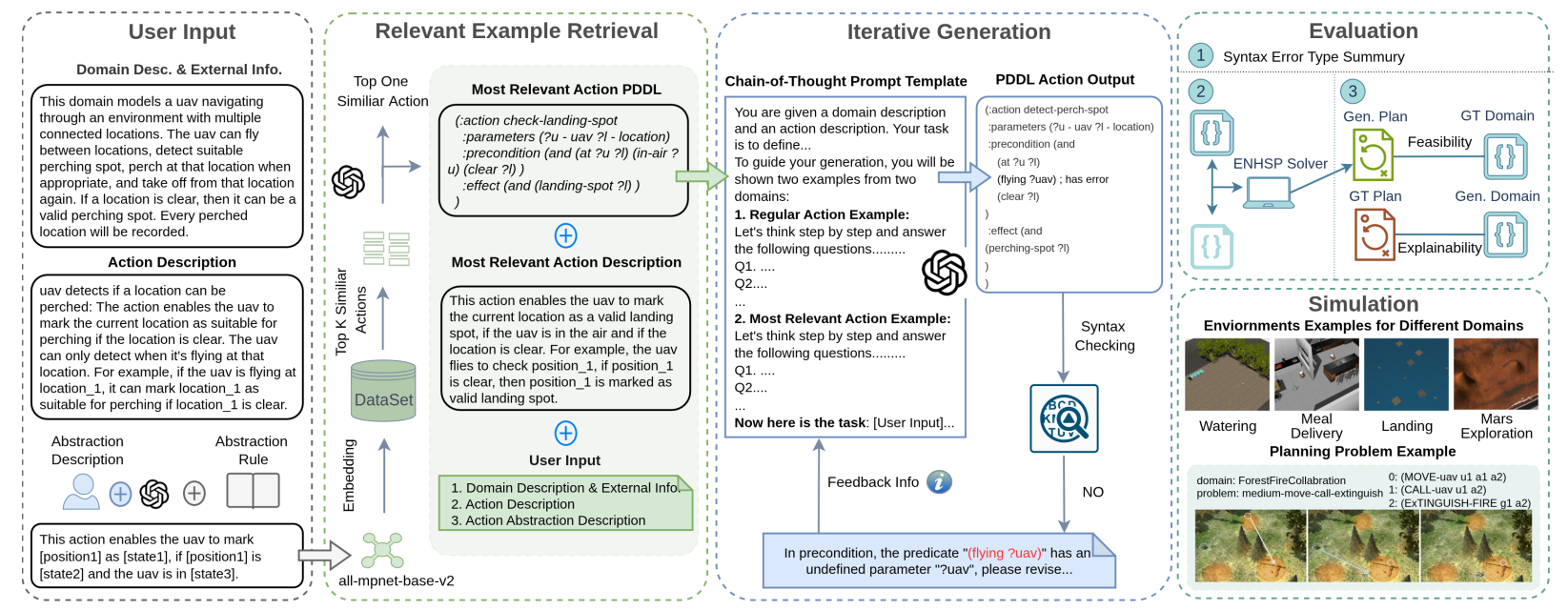
SPAR: Scalable LLM-based PDDL Domain Generation for Aerial Robotics
Songhao Huang*, Yuwei Wu*, Guangyao Shi, Gaurav S. Sukhatme, Vijay Kumar IROS, 2026 arXiv / code Using LLM in PDDL domain generation for robot task planning. |
|
|
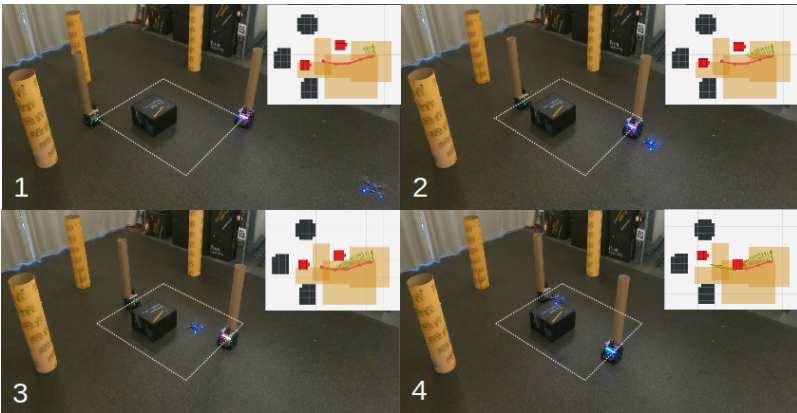
Safe Interval Motion Planning for Quadrotors in Dynamic Environments.
Songhao Huang*, Yuwei Wu*, Yuezhan Tao, Vijay Kumar ICRA, 2025 video / arXiv Using Safe interval motion planning and gradient-based trajectory optimization for UAV motion planning in dynamic environments. |
|
follow Jon Barron's website. |
